マルチプラットフォーム向け統合開発環境「Unity」を提供するユニティ・テクノロジーズ・ジャパン株式会社(本社:東京都中央区、代表取締役:豊田 信夫、以下 当社)は、親会社であるUnityが本日、Unity上で再現した多関節型ロボットに対して姿勢推定を実行できるデモンストレーション『Object Pose Estimation』を発表しました。
Object Pose Estimation
https://github.com/Unity-Technologies/Robotics-Object-Pose-Estimation
このデモでは、コンピュータビジョンとシミュレーションの技術を組み合わせ、UnityのAIと機械学習が産業界でのロボット利用にどのような効果をもたらすかを説明しています。Object Pose Estimationとそれに対応するデモンストレーションは、ロボットソフトウェア開発に用いられるフレームワークであるRobot Operating System (ROS)をサポートすることを目的としたUnity Robotics Hubの一連のリリースに続くものです。
Unity Robotics Hub
https://github.com/Unity-Technologies/Unity-Robotics-Hub
これらのUnityが提供するツールとその他のオープンソースのツールセットを組み合わせることで、ロボット開発者は安全に、コスト効率よく、迅速にソリューションの探索、テスト、開発、デプロイを行うことができます。
UnityのAI担当シニア・ヴァイスプレジデントであるダニー・ラング(Danny Lange)博士は次のように述べています。「これは、予めプログラムされたシステムではなく、自ら学習するシステムの例であり、合成データから学習することで、どんなプログラマーにもできないような微妙な組み合わせを捕らえることができるようになります。UnityはAIと既存のUnityのテクノロジーの融合を積極的に行っており、今回のデモンストレーションでは、ロボット開発におけるトレーニングの効率化が可能であることを示しています」
シミュレーション技術は、危険な状況、対象物が高額な状況、または滅多に起こらないような状況でアプリケーションをテストする場合に非常に効果的で有利です。ロボットにデプロイする前にシミュレーションによりアプリケーションを検証することで、潜在的な問題を早期に明らかにすることができ、開発の繰り返しにかかる時間を短縮することができます。Unityに内蔵された物理エンジンとUnity Editorを組み合わせることで、仮想環境の無限の組み合わせを作成することができ、現実世界でオブジェクトに作用する力を(近似的に)制御することができます。
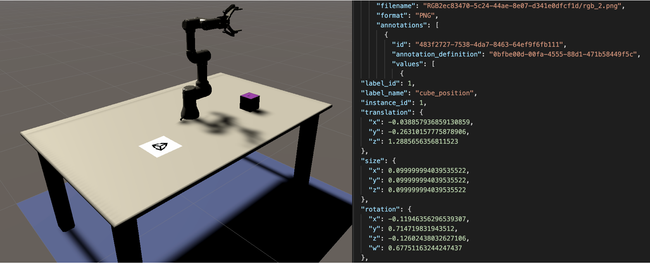
Object Pose Estimationのデモは、URDFファイルをUnityにインポートするためのオープンソース・URDF Importerパッケージのリリースに続き、よりリアルなキネマティックシミュレーションのために強化されたアーティキュレーションのサポートを活用しています。また、Unityが提供するUnity ROS-TCP Connectorでは、ROSノードとUnityとの間でのリアルタイムに近い低遅延な通信を可能にします。今回のデモでは、最近リリースされたPerception SDKのUnity Computer Visionツールを使用して、膨大な量の合成ラベル付きトレーニングデータを作成し、キューブの位置を予測するためのシンプルなディープラーニングモデルを訓練する方法を紹介します。デモでは、このプロジェクトを再現する方法についてのチュートリアルを提供しています。
Object Pose Estimationのデモは、URDFファイルをUnityにインポートするためのオープンソース・URDF Importerパッケージのリリースに続き、よりリアルなキネマティックシミュレーションのために強化されたアーティキュレーションのサポートを活用しています。また、Unityが提供するUnity ROS-TCP Connectorでは、ROSノードとUnityとの間でのリアルタイムに近い低遅延な通信を可能にします。今回のデモでは、最近リリースされたPerception SDKのUnity Computer Visionツールを使用して、膨大な量の合成ラベル付きトレーニングデータを作成し、キューブの位置を予測するためのシンプルなディープラーニングモデルを訓練する方法を紹介します。デモでは、このプロジェクトを再現する方法についてのチュートリアルを提供しています。
Unity Computer Visionツール
https://unity.com/ja/computer-vision
URDF Importer
https://github.com/Unity-Technologies/URDF-Importer
Unity ROS-TCP Connector
https://github.com/Unity-Technologies/ROS-TCP-Connector
Perception SDK
https://github.com/Unity-Technologies/com.unity.perception
【参考記事】Unity Blog - アーティキュレーションボディを使って、リアルな動きや振る舞いを再現した産業デザインのプロトタイピングを容易に実現
https://blogs.unity3d.com/jp/2020/05/20/use-articulation-bodies-to-easily-prototype-industrial-designs-with-realistic-motion-and-behavior/
またダニー・ラング博士は次のように述べています。「Unityを使うことで、データ生成を民主化しただけでなく、仮想環境で高度なシミュレーションするためのインタラクティブなシステムへのアクセスも可能になりました。例えば、自動運転車両の制御システムを開発したり、今回の例では高額なロボットアームの制御システムを開発することができますが、機器を損傷させたり、工業設備のコストを劇的に増加させたりするリスクはありません。高忠実度な仮想環境で期待されたアプリケーションを証明できるようにすることは、AIと機械学習を組み合わせたロボット工学によって変革されようとしている多くの産業にとって、時間とコストを節約することになるでしょう」
ロボット工学の未来を拓くUnityの活動の詳細については、Unity Roboticsのページをご覧ください。
https://unity.com/ja/solutions/automotive-transportation-manufacturing/robotics
ユニティ・テクノロジーズ・ジャパン株式会社について
ユニティ・テクノロジーズ・ジャパンは、リアルタイム3Dコンテンツを作成・運用するための世界有数のプラットフォーム「Unity」の日本国内での販売やサポート、コミュニティ活動、研究開発(R&D)および教育支援などを行っています。ゲーム開発者からアーティスト、建築家、自動車デザイナー、映画製作者など、さまざまなクリエイターがUnityを使い想像力を発揮しています。Unityのプラットフォームは、携帯電話、タブレット、PC、コンソールゲーム機、VR・ARデバイス向けのインタラクティブなリアルタイム2Dおよび3Dコンテンツを作成、実行、収益化するための包括的なソフトウェアソリューションを提供しています。1,400人以上在籍するUnityのR&Dチームは、外部パートナーと協力して最新リリースやプラットフォームのために最適化されたサポートを保証することで、Unityをコンテンツ制作の最先端であるようにし続けています。Unityのクリエイターが開発したアプリは、2019年に20億以上のユニークデバイスで月30億回以上ダウンロードされました。
※Unityおよび関連の製品名はUnity Technologiesまたはその子会社の商標です。
からの記事と詳細 ( Unity、産業用ロボットアプリ開発の可能性を拓くデモプロクジェクト『Object Pose Estimation』を発表 - PR TIMES )
https://ift.tt/3rgpLxu
No comments:
Post a Comment